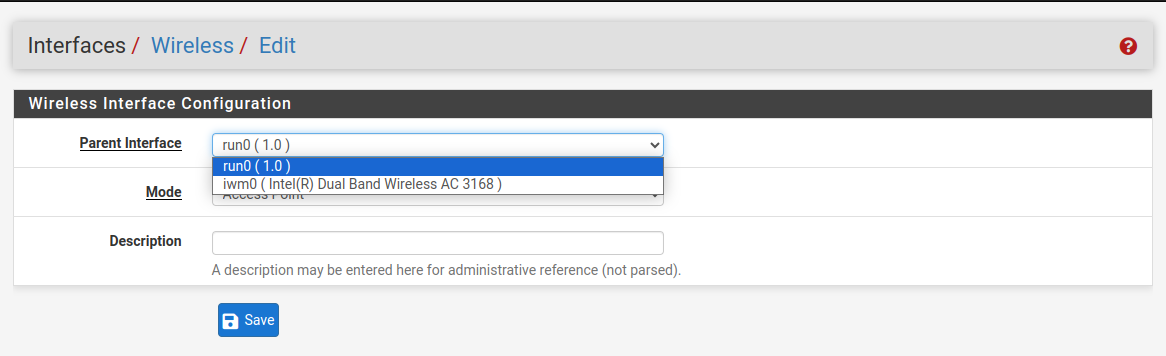
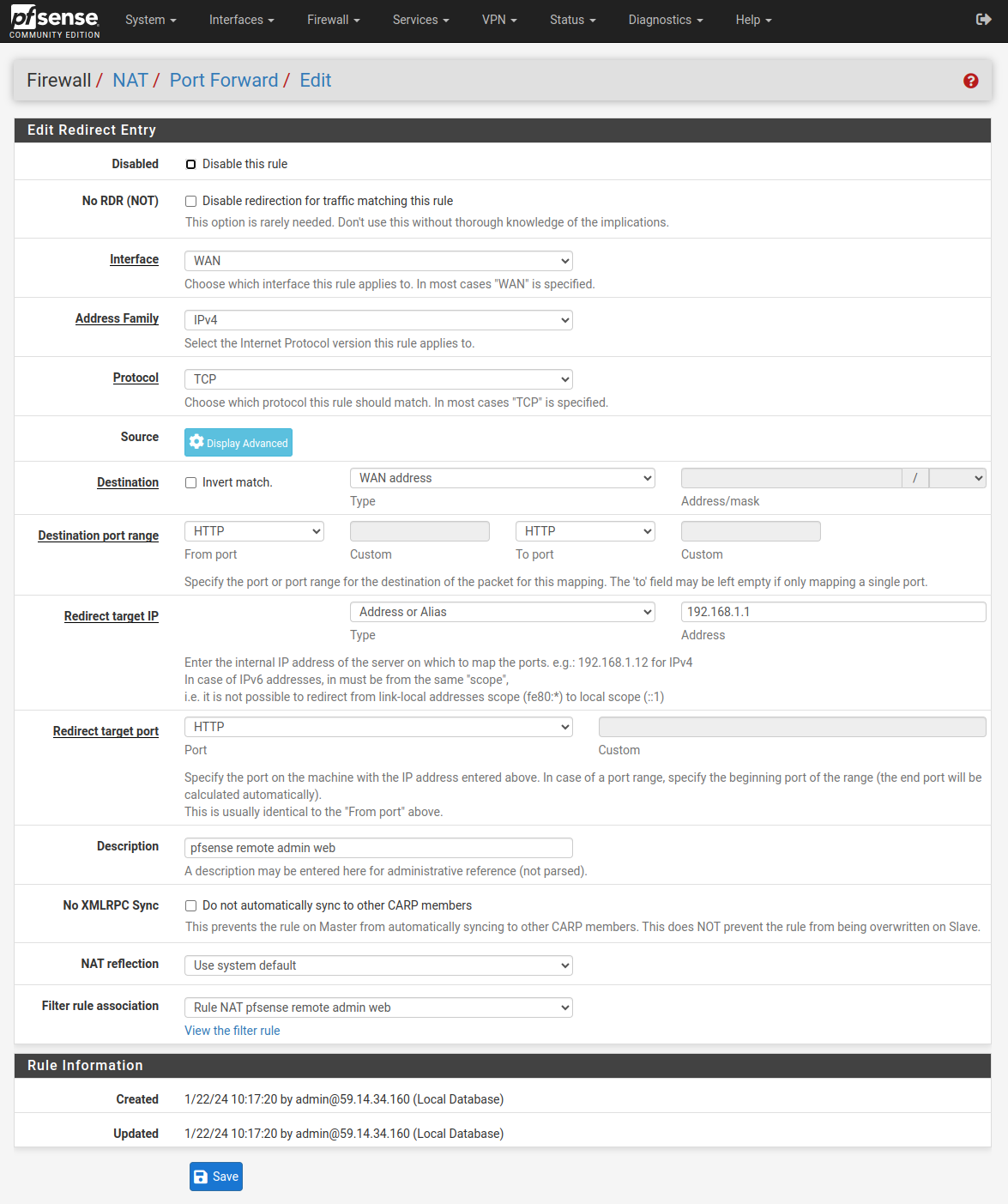
Common Address Redundancy Protocol (CARP) was created by OpenBSD developers as a free, open redundancy solution for sharing IP addresses among a group of network devices.
UseCtrlD, which is set by default as the ttyeofkey. When pressed in the middle of a line, it will give to netcat everything that has been input at that point.
# lets import pre trained VGG16 Which is already Builtin for computer vision from tensorflow.keras.applications import VGG16 from tensorflow.keras.layers import Input
# Imagenet is a competition every year held and VGG16 is winner of between 2013-14 # so here we just want limited layers so thats why we false included_top vgg=VGG16(weights='imagenet',include_top=False,input_tensor=Input(shape=(224,224,3)))
# lets save model model.save('detect_Planes.h5')
from tensorflow.keras.models import load_model model=load_model('/content/detect_Planes.h5')
In the MobileNetV2 SSD FPN-Lite, we have a base network (MobileNetV2), a detection network (Single Shot Detector or SSD) and a feature extractor (FPN-Lite).
Base network:
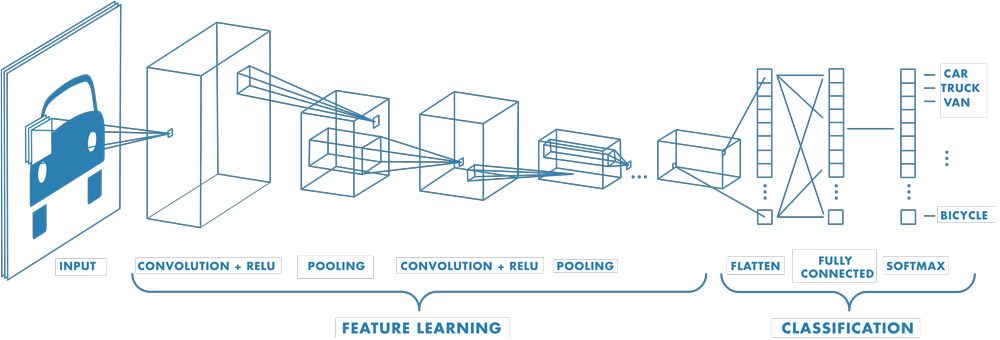
MobileNet, like VGG-Net, LeNet, AlexNet, and all others, are based on neural networks. The base network provides high-level features for classification or detection. If you use a fully connected layer and a softmax layer at the end of these networks, you have a classification.
Example of a network composed of many convolutional layers. Filters are applied to each training image at different resolutions, and the output of each convolved image is used as input to the next layer (source Mathworks)
But you can remove the fully connected and the softmax layers, and replace it with detection networks, like SSD, Faster R-CNN, and others to perform object detection.
Detection network:
The most common detection networks are SSD (Single Shot Detection) and RPN (Regional Proposal Network).
When using SSD, we only need to take one single shot to detect multiple objects within the image. On the other hand, regional proposal networks (RPN) based approaches, such as R-CNN series, need two shots, one for generating region proposals, one for detecting the object of each proposal.
As a consequence, SSD is much faster compared with RPN-based approaches but often trades accuracy with real-time processing speed. They also tend to have issues in detecting objects that are too close or too small.
Feature Pyramid Network:
Detecting objects in different scales is challenging in particular for small objects. Feature Pyramid Network (FPN) is a feature extractor designed with feature pyramid concept to improve accuracy and speed.