Allows options like -dn 7 to push the preview onto HDMI1. Values are Dispmanx display enums, therefore predominantly 0 = DSI/DPI LCD 2 = HDMI0 3 = SDTV 7 = HDMI1 Behaviour should the chosen display not be present should be to revert to the primary display that is present.
Traceback (most recent call last): File "./compensated-temperature.py", line 36, in <module> cpu_temp = get_cpu_temperature() File "./compensated-temperature.py", line 28, in get_cpu_temperature return float(output[output.index('=') + 1:output.rindex("'")]) TypeError: argument should be integer or bytes-like object, not 'str'
$ python3 ./temperature-forced-mode.py Traceback (most recent call last): File "./temperature-forced-mode.py", line 16, in <module> bmp280.setup(mode="forced") TypeError: setup() got an unexpected keyword argument 'mode'
$ lsblk NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT mmcblk0 179:0 0 29.1G 0 disk ├─mmcblk0p1 179:1 0 256M 0 part /boot └─mmcblk0p2 179:2 0 28.9G 0 part / mmcblk0boot0 179:32 0 4M 1 disk mmcblk0boot1 179:64 0 4M 1 disk
$ mount | grep mmc /dev/mmcblk0p2 on / type ext4 (rw,noatime) /dev/mmcblk0p1 on /boot type vfat (rw,relatime,fmask=0022,dmask=0022,codepage=437,iocharset=ascii,shortname=mixed,errors=remount-ro)
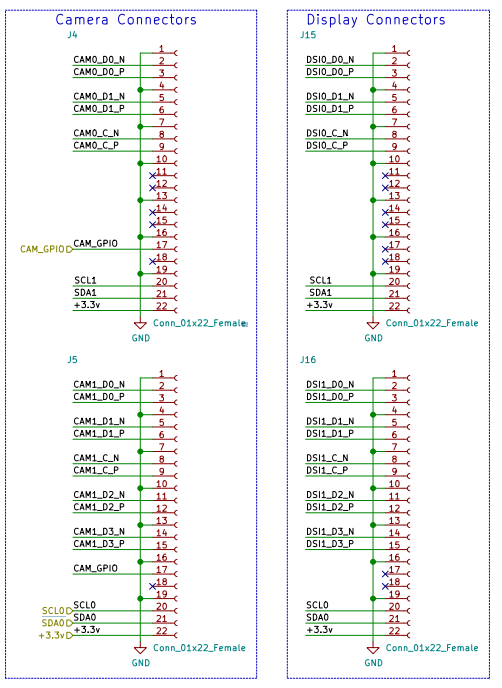
raspi-config 에서 camera on , i2c on 켠 상태면 아래와 같이 설정된다.
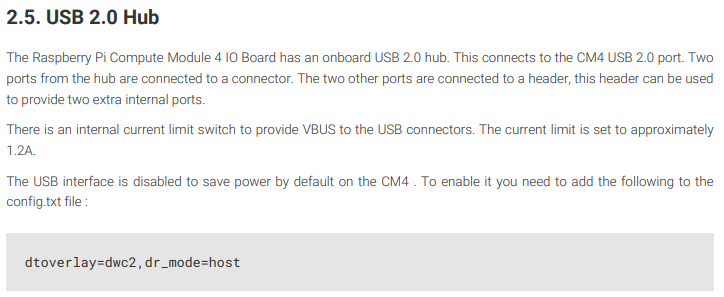
USB host를 사용하기 위한 dtoverlay와
CM4 보드에 장착된 RTC 및 팬 컨트롤러를 쓰기 위한 dtparam 설정은 파란색 으로 수동 추가해야 함.
$ cat /boot/config.txt # For more options and information see # http://rpf.io/configtxt # Some settings may impact device functionality. See link above for details
# uncomment if you get no picture on HDMI for a default "safe" mode #hdmi_safe=1
# uncomment this if your display has a black border of unused pixels visible # and your display can output without overscan #disable_overscan=1
# uncomment the following to adjust overscan. Use positive numbers if console # goes off screen, and negative if there is too much border #overscan_left=16 #overscan_right=16 #overscan_top=16 #overscan_bottom=16
# uncomment to force a console size. By default it will be display's size minus # overscan. #framebuffer_width=1280 #framebuffer_height=720
# uncomment if hdmi display is not detected and composite is being output #hdmi_force_hotplug=1
# uncomment to force a specific HDMI mode (this will force VGA) #hdmi_group=1 #hdmi_mode=1
# uncomment to force a HDMI mode rather than DVI. This can make audio work in # DMT (computer monitor) modes #hdmi_drive=2
# uncomment to increase signal to HDMI, if you have interference, blanking, or # no display #config_hdmi_boost=4
# uncomment for composite PAL #sdtv_mode=2
#uncomment to overclock the arm. 700 MHz is the default. #arm_freq=800
# Uncomment some or all of these to enable the optional hardware interfaces dtparam=i2c_arm=on #dtparam=i2s=on #dtparam=spi=on
# Uncomment this to enable infrared communication. #dtoverlay=gpio-ir,gpio_pin=17 #dtoverlay=gpio-ir-tx,gpio_pin=18
# Additional overlays and parameters are documented /boot/overlays/README
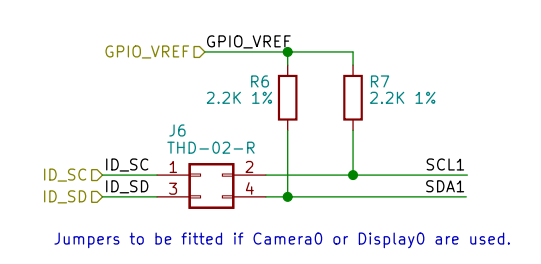
To enable the I2C bus to the RTC you will need dtparam=i2c_vc=on set in config.txt . The RTC then will be on i2c-10 address 0x51 ( 7bit address) To enable the I2C bus to the fan controller you will need dtparam=i2c_vc=on set in config.txt . The fan controller then will be on i2c-10 address 0x2f( 7bit address)
$ sudo mount /dev/sdb /mnt/ NTFS signature is missing. Failed to mount '/dev/sdb': 부적절한 인수 The device '/dev/sdb' doesn't seem to have a valid NTFS. Maybe the wrong device is used? Or the whole disk instead of a partition (e.g. /dev/sda, not /dev/sda1)? Or the other way around?
+
rpi4는 SPI EEPROM 512KB(4Mbit) 짜리 달려있고 거기에 bootcode.bin이 들어있다고